이전
다음
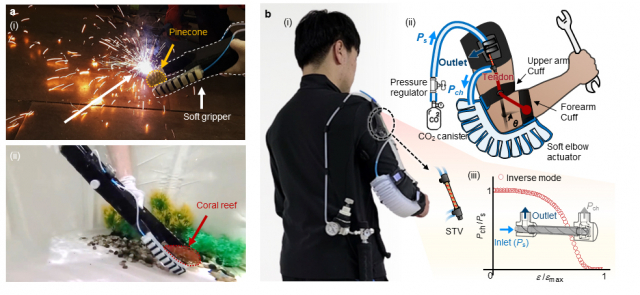 소프트 밸브를 활용한 예시. 전자제품 없이 여러 환경에서 다양한 물건을 집을 수 있는 소프트 그리퍼(왼쪽). 팔 굽힘 각도에 따라 자동으로 팔꿈치를 보조해주는 웨어러블 로봇(오른쪽). 유니스트
소프트 밸브를 활용한 예시. 전자제품 없이 여러 환경에서 다양한 물건을 집을 수 있는 소프트 그리퍼(왼쪽). 팔 굽힘 각도에 따라 자동으로 팔꿈치를 보조해주는 웨어러블 로봇(오른쪽). 유니스트
 소프트 밸브 기술을 개발한 연구진. 왼쪽 원형 위 김지윤 교수, 원형 아래 배준범 교수, 제1 저자 김준수 연구원, 제 1저자 최준규 연구원. 사진제공=유니스트
소프트 밸브 기술을 개발한 연구진. 왼쪽 원형 위 김지윤 교수, 원형 아래 배준범 교수, 제1 저자 김준수 연구원, 제 1저자 최준규 연구원. 사진제공=유니스트
소프트 밸브를 활용한 예시. 전자제품 없이 여러 환경에서 다양한 물건을 집을 수 있는 소프트 그리퍼(왼쪽). 팔 굽힘 각도에 따라 자동으로 팔꿈치를 보조해주는 웨어러블 로봇(오른쪽). 유니스트
소프트 밸브 기술을 개발한 연구진. 왼쪽 원형 위 김지윤 교수, 원형 아래 배준범 교수, 제1 저자 김준수 연구원, 제 1저자 최준규 연구원. 사진제공=유니스트